Робот своїми руками із підручних засобів. Як зробити робота в домашніх умовах для дитини? Що вам може знадобитися
Ольга Ґруніна
Робототехніка- Захоплююче заняття в будь-якому віці. Конструювання саморобного роботане тільки захоплююче заняття, а й
процес пізнання у багатьох областях. І зовсім не обов'язково бути інженером, аби створити робота, хоч би з підручного матеріалу.
Освітня робототехніканабуває все більшої значущості та актуальності в даний час. Заняття з робототехнікизнайомлять дитину із законами реального світу, вчать застосовувати теоретичні знання практично, розвивають спостережливість, мислення, кмітливість, креативність.
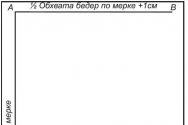
Для роботи знадобляться:
Дві коробки, кришки, баночки, гірлянда новорічна, папір-самоклейка, клей.
Ціль:
1. Розвивати дрібну моторику.
2. Ознайомити дітей зі світом роботів.
3. Розвивати творчі здібностіі логічне мисленнядітей.
4. Формувати інтерес до світу науки, техніки.
5. Сприяти розвитку конструкторських навичок.
6. Розвивати мовлення, мислення, уяву.
Це чий там чути тупіт?
На роботу вийшов робот.
М'язи металеві,
Думки електричні.
Робот лампою блимав,
Робот лапою помахав:
«Подивіться, хлопці,
Як я ріллю розорав!»
Валентин Берестов
День науки у дитячому садку

Обклеїти відповідні коробки папером-самоклейкою.

Стане в нагоді неробоча Новорічна гірляндата палички від вішалки.
Публікації на тему:
Шановні колеги, пропоную Вашій увазі книжку, що розвиває – трансформер «Робот - Арифмет». У нашому дитячому садку проходив конкурс.
Цілі: вчити дітей складати геометрично правильно і точно виріб, який діти задумали зробити (робот); навчити дітей бачити форму.
Восьме лютого наша країна відзначає всеросійське свято "День науки". Кожен знає, що науковий співробітник щось винаходить. У рамках.
Методичний посібник «Робот Робік у гостях у дітей».Актуальність. Кілька десятків років тому мало хто з вчорашніх хлопчаків не хотів стати космонавтом. Ця мрія зовсім не актуальна.
НОД з лего-конструювання «Робот»Муніципальне бюджетне дошкільне освітня установа«Дитячий садок №15 «Казка» Конспект безпосередньо – освітній.
Проект «Дитячий садок майбутнього»Якщо і мріяти якийсь дитячий садок майбутнього має бути в нашій країні, то, на мою думку, він має бути таким: Головний елемент будь-якої структури.
У нашому дитячому садку «Казка» проводився чудовий конкурс під назвою «Бал роботів». То справді був справжній бал. Діти разом.
Зробити роботадуже просто Давайте розберемося, що потрібно буде щоб створити роботав домашніх умовах, щоб зрозуміти основи робототехніки.
Напевно, надивившись фільмів про роботів, тобі неодноразово хотілося побудувати свого бойового товариша, але ти не знав з чого почати. Звичайно, у тебе не вдасться побудувати двоногого термінатора, але ми й не прагнемо цього. Зібрати простого робота може будь-хто, хто вміє правильно тримати паяльник у руках і для цього не потрібно глибоких знань, хоча вони й не завадять. Аматорське роботобудування мало чим відрізняється від схемотехніки, тільки набагато цікавіше, тому що тут так само порушені такі галузі, як механіка та програмування. Всі компоненти доступні і коштують не так вже й дорого. Отже, прогрес не стоїть на місці, і ми будемо його використовувати на свою користь.
Вступ
Отже. Що таке робот? Найчастіше це автоматичний пристрійщо реагує на будь-які дії навколишнього середовища. Роботи можуть керуватися людиною або виконувати заздалегідь запрограмовані дії. Зазвичай на роботі розташовують різноманітні датчики (відстань, кут повороту, прискорення), відеокамери, маніпулятори. Електронна частина робота складається з мікроконтролера (МК) – мікросхема, в яку укладено процесор, тактовий генератор, різна периферія, оперативна та постійна пам'ять. У світі існує безліч різноманітних мікроконтролерів для різних областей застосування і на їх основі можна збирати потужних роботів. Для аматорських будівель широкого застосування знайшли мікроконтролери AVR. Вони, на сьогоднішній день, найдоступніші та в інтернеті можна знайти багато прикладів на основі цих МК. Щоб працювати з мікроконтролерами, тобі потрібно вміти програмувати на асемблері або на Cі і мати початкові знання в цифровій та аналоговій електроніці. У нашому проекті ми будемо використовувати Cі. Програмування для МК мало чим відрізняється від програмування на комп'ютері, синтаксис мови такий самий, більшість функцій практично нічим не відрізняються, а нові досить легко освоїти і зручно ними користуватися.
Що нам потрібно
Для початку наш робот вмітиме просто об'їжджати перешкоди, тобто повторювати нормальну поведінку більшості тварин у природі. Все, що нам знадобиться для будівництва такого робота, можна буде знайти в радіотехнічних магазинах. Вирішимо, як наш робот пересуватиметься. Найвдалішим я вважаю гусениці, які застосовуються в танках, це найбільш зручне рішення, тому що гусениці мають більшу прохідність, ніж колеса машини і зручніше керувати ними (для повороту достатньо обертати гусениці в різні боки). Тому тобі знадобиться будь-який іграшковий танк, у якого гусениці обертаються незалежно один від одного, такий можна купити в будь-якому магазині за розумною ціною. Від цього танка тобі знадобиться лише платформа з гусеницями та мотори з редукторами, решту ти можеш сміливо відкрутити та викинути. Також нам знадобиться мікроконтролер, мій вибір упав на ATmega16 - у нього достатньо портів для підключення датчиків і периферії і взагалі він досить зручний. Ще тобі потрібно купити трохи радіодеталей, паяльник, мультиметр.
Робимо плату з МК
У нашому випадку мікроконтролер виконуватиме функції мозку, але почнемо ми не з нього, а з живлення мозку робота. Правильне харчування- Запорука здоров'я, тому ми почнемо з того, як правильно годувати нашого робота, тому що на цьому зазвичай помиляються роботобудівники-початківці. А для того, щоб наш робот працював нормально, потрібно використовувати стабілізатор напруги. Я віддаю перевагу мікросхемі L7805 - вона призначена, щоб на виході видавати стабільну напругу 5В, яка і потрібна нашому мікроконтролеру. Але через те, що падіння напруги на цій мікросхемі становить близько 2,5В до нього потрібно подавати мінімум 7,5В. Разом з цим стабілізатором використовуються електролітичні конденсатори, щоб згладити пульсації напруги і в ланцюг обов'язково включають діод для захисту від переполюсування.
Тепер ми можемо зайнятися нашим мікроконтролером. Корпус у МК - DIP (так зручніше паяти) і має сорок висновків. На борту є АЦП, ШИМ, USART та багато іншого, що ми поки що використовувати не будемо. Розглянемо кілька важливих вузлів. Висновок RESET (9-а нога МК) підтягнутий резистором R1 до «плюсу» джерела живлення – це потрібно робити обов'язково! Інакше твій МК може ненавмисно скидатися або, простіше кажучи, глючити. Також бажаним заходом, але не обов'язковим є підключення RESET'а через керамічний конденсатор C1 до «землі». На схемі ти також можеш побачити електроліт на 1000 мкФ, він рятує від провалів напруги при роботі двигунів, що теж сприятливо позначиться на роботі мікроконтролера. Кварцовий резонатор X1 та конденсатори C2, C3 потрібно розташовувати якомога ближче до висновків XTAL1 та XTAL2.
Про те, як прошивати МК, я не розповідатиму, оскільки про це можна прочитати в інтернеті. Писати програму ми будемо на Cі, як середовище програмування я вибрав CodeVisionAVR. Це досить зручне середовище та корисне новачкам, тому що має вбудований майстер створення коду.

Управління двигунами
Не менш важливим компонентом нашого робота є драйвер двигунів, який полегшує нам завдання в управлінні ним. Ніколи і в жодному разі не можна підключати двигуни безпосередньо до МК! Взагалі потужними навантаженнями не можна керувати безпосередньо з мікроконтролера, інакше він згорить. Використовуйте ключові транзистори. Для нашого випадку є спеціальна мікросхема – L293D. У таких нескладних проектах завжди намагайтеся використовувати саме цю мікросхему з індексом «D», оскільки вона має вбудовані діоди для захисту від перевантажень. Цією мікросхемою дуже легко керувати та її просто дістати в радіотехнічних магазинах. Вона випускається у двох корпусах DIP та SOIC. Ми будемо використовувати у корпусі DIP через зручність монтажу на платі. L293D має роздільне живлення двигунів та логіки. Тому саму мікросхему ми живитимемо від стабілізатора (вхід VSS), а двигуни безпосередньо від акумуляторів (вхід VS). L293D витримує навантаження 600 мА на кожен канал, а цих каналів у неї два, тобто до однієї мікросхеми можна підключити два двигуни. Але щоб перестрахуватися, ми об'єднаємо канали, і тоді буде потрібно по одній мікро на кожний двигун. Звідси випливає, що L293D зможе витримати 1.2 А. Щоб цього досягти потрібно об'єднати ноги мікро, як показано на схемі. Мікросхема працює наступним чином: коли на IN1 та IN2 подається логічний «0», а на IN3 та IN4 логічна одиниця, то двигун обертається в один бік, а якщо інвертувати сигнали – подати логічний нуль, тоді двигун почне обертатися в іншу сторону. Висновки EN1 та EN2 відповідають за включення кожного каналу. Їх ми з'єднуємо та підключаємо до «плюсу» живлення від стабілізатора. Так як мікросхема гріється під час роботи, а установка радіаторів проблематична на цей тип корпусу, то відведення тепла забезпечується ногами GND - їх краще розпаювати на широкому контактному майданчику. Ось і все, що спочатку тобі потрібно знати про драйвери двигунів.
Датчики перешкод
Щоб наш робот міг орієнтуватися і не врізався у все, ми встановимо на нього два інфрачервоні датчики. Найпростіший датчик складається з ик-діода, який випромінює в інфрачервоному спектрі та фототранзистор, який прийматиме сигнал з ік-діода. Принцип такий: коли перед датчиком немає перешкоди, то ик-промені не потрапляють на фототранзистор і не відкривається. Якщо перед датчиком перешкода, тоді промені від нього відбиваються і потрапляють на транзистор - він відкривається і починає текти струм. Недолік таких датчиків у тому, що вони можуть по-різному реагувати на різні поверхніі не захищені від перешкод - від сторонніх сигналів інших пристроїв датчик може випадково спрацювати. Від перешкод може захистити модулювання сигналу, але поки ми цим не морочимось. Для початку і цього вистачить.

Прошивка робота
Щоб оживити робота, для нього потрібно написати прошивку, тобто програму, яка знімала б показання з датчиків і керувала двигунами. Моя програма є найпростішою, вона не містить складних конструкцій і всім буде зрозуміла. Наступні два рядки підключають заголовні файли для нашого мікроконтролера та команди для формування затримок:
#include
#include
Наступні рядки умовні, тому що значення PORTC залежать від того, як ти підключив драйвер двигунів до свого мікроконтролера:
PORTC.0 = 1; PORTC.1 = 0; PORTC.2 = 1; PORTC.3 = 0; Значення 0xFF означає, що у виході буде лог. "1", а 0x00 - лог. "0". Наступною конструкцією ми перевіряємо, чи є перед роботом перешкода і з якого боку: if (!(PINB & (1)< Якщо на фототранзистор потрапляє світло від ік-діода, то на нозі мікроконтролера встановлюється балка. "0" і робот починає рух назад, щоб від'їхати від перешкоди, потім розвертається, щоб знову не зіткнутися з перепоною і потім знову їде вперед. Так як у нас два датчики, то ми перевіряємо наявність перешкоди двічі - праворуч і ліворуч і тому можемо дізнатися з якого боку перешкоду. Команда delay_ms(1000) вказує на те, що пройде одна секунда, перш ніж почне виконуватися наступна команда. Я розглянув більшість аспектів, які допоможуть тобі зібрати твого першого робота. Але на цьому робототехніка не закінчується. Якщо ти збереш цього робота, то в тебе з'явиться безліч можливостей для його розширення. Можна вдосконалити алгоритм робота, як, наприклад, що робити, якщо перешкода не з якогось боку, а перед роботом. Також не завадить встановити енкодер - простий пристрій, який допоможе точно розташовувати і знати розташування твого робота в просторі. Для наочності можливе встановлення кольорового або монохромного дисплея, який може показувати корисну інформацію - рівень заряду акумулятора, відстань до перешкоди, різну інформацію налагодження. Не завадить і вдосконалення датчиків – установка TSOP (це іч-приймачі, які сприймають сигнал лише певної частоти) замість звичайних фототранзисторів. Крім інфрачервоних датчиків існують ультразвукові, коштують дорожче, і теж не позбавлені недоліків, але останнім часом набирають популярності роботобудівники. Щоб робот міг реагувати на звук, було б непогано встановити мікрофони з підсилювачем. Але по-справжньому цікавим, я вважаю, встановлення камери та програмування на її основі машинного зору. Є набір спеціальних бібліотек OpenCV, за допомогою яких можна запрограмувати розпізнавання осіб, рухи кольоровими маяками та багато всього цікавого. Все залежить тільки від твоєї фантазії та вмінь. Список компонентів: ATmega16 у корпусі DIP-40> L7805 у корпусі TO-220 L293D у корпусі DIP-16 х2 шт. резистори потужністю 0,25 Вт номіналами: 10 кОм х1 шт., 220 Ом х4 шт. конденсатори керамічні: 0.1 мкф, 1 мкф, 22 пф електролітичні конденсатори: 1000 мкФ х 16 В, 220 мкФ х 16В х2 шт. діод 1N4001 або 1N4004 кварцовий резонатор на 16 МГц ІЧ-діоди: підійдуть будь-які в кількості двох штук. фототранзистори, теж будь-які, але реагуючі тільки на довжину хвилі ик-променів Код прошивки: На даний момент мій робот практично завершений. На ньому встановлено бездротову камеру, датчик відстані (і камеру і цей датчик встановлено на поворотній вежі), датчик перешкоди, енкодер, приймач сигналів з пульта та інтерфейс RS-232 для з'єднання з комп'ютером. Працює у двох режимах: автономному та ручному (приймає сигнали керування з пульта дистанційного керування), камера також може вмикатися/вимикатися дистанційно або самим роботом для економії заряду батарей. Пишу прошивку охорони квартири (передача зображення на комп'ютер, виявлення рухів, об'їзд приміщення). Щоб створити свого робота, необов'язково отримувати вищу чи читати масу. Достатньо скористатися покроковою інструкцією, яку пропонують майстри робототехніки на своїх сайтах. В Інтернеті можна знайти багато корисної інформації, присвяченої розробці автономних роботизованих систем. Інформація на сайті дозволяє самостійно створити робота зі складною поведінкою. Тут можна знайти приклади програм, схеми, довідкові матеріали, готові приклади, статті та фотографії. Початківцям на сайті присвячений окремий розділ. Творці ресурсу роблять значний акцент на мікроконтролери, розробку універсальних плат для робототехніки і пайку мікросхем. Тут також можна знайти вихідні коди програм та безліч статей з практичними порадами. На сайті є спеціальний курс «Крок за кроком», де детально описаний процес створення найпростіших BEAM-роботів, а також автоматизованих систем на основі мікроконтролерів AVR. Сайт, де творці роботів-початківців зможуть знайти всю необхідну теоретичну та практичну інформацію. Тут також розміщується велика кількість корисних тематичних статей, оновлюються новини та можна поставити запитання досвідченим робототехнікам на форумі. Цей ресурс присвячений поступового занурення у світ створення роботів. Починається все з пізнання Arduino, після чого розробнику-початківцю розповідають про мікроконтролери AVR і більш сучасні аналоги ARM. Детальні описи та схеми дуже доступно пояснюють, як і що робити. Сайт про те, як зробити BEAM робота своїми руками. Тут є цілий розділ, присвячений основам, також наведено логічні схеми, приклади тощо. На цьому ресурсі дуже зрозуміло розписано, як самостійно створити робота, з чого почати, що потрібно знати, де шукати інформацію та необхідні деталі. Сервіс також містить розділ із блогом, форумом та новинами. Величезний живий форум, присвячений створенню роботів. Тут відкриті теми для новачків, розглядаються цікаві проекти та ідеї, описуються мікроконтролери, готові модулі, електроніка та механіка. А головне – можна поставити будь-яке питання з роботобудування та отримати розгорнуту відповідь від професіоналів. Ресурс робототехніка-любителя присвячений насамперед його власному проекту «Самодельний робот». Однак тут можна знайти дуже багато корисних тематичних статей, посилань на цікаві сайти, дізнатися про досягнення автора та обговорити різноманітні конструкторські рішення. Апаратна платформа Arduino є найзручнішою для розробки роботизованих систем. Інформація сайту дозволяє швидко розібратися в цьому середовищі, освоїти мову програмування та створити кілька нескладних проектів. Кому не хотілося б мати універсального помічника, готового виконати будь-яке доручення: помити посуд, закупити продуктів, поміняти колесо в автомобілі та й відвезти дітей у садок, а батьків на роботу? Ідея створення механізованих асистентів займає інженерні уми ще з давніх часів. А Карел Чапек навіть вигадав слово, що означає механічного слугу – робота, який виконує обов'язки замість людини. На щастя, у нинішньому цифровому столітті такі помічники напевно незабаром стануть реальністю. Насправді, інтелектуальні механізми вже допомагають людині у виконанні домашніх справ: робот-пилосос забереться, поки господарі на роботі, мультиварка допоможе приготувати їжу, не гірше за скатертину-самобранку, а грайливе щеня Айбо радісно принесе капці чи м'яч. Складні роботи використовуються на виробництві, медицині та космосі. Вони дозволяють частково, або навіть повністю, замінити працю людини у складних чи небезпечних умовах. Андроїди при цьому намагаються зовні бути схожими на людей, тоді як промислові роботи зазвичай створюються з економічних та технологічних міркувань і зовнішній декор у них аж ніяк не в пріоритеті. Але виявляється, можна спробувати зробити робота за допомогою підручних засобів. Так, можна сконструювати оригінальний механізм із телефонної трубки, комп'ютерної мишки, зубної щітки, старого фотоапарата або всюдисущої пластикової пляшки. Розмістивши кілька датчиків на платформі, можна запрограмувати такого робота на виконання простих операцій: регулювання освітленості, подачу сигналів, рух по кімнаті. Звичайно, це далеко не багатофункціональний помічник із фантастичних фільмів, зате таке заняття розвиває винахідливість та творче інженерне мислення, і беззастережно викликає захоплення у тих, хто вважає роботобудування абсолютно не кустарною справою. Одне із найпростіших рішень на шляху до того, щоб зробити робота – придбати готовий набір для робототехніки з покроковим керівництвом. Цей варіант підійде також тим, хто збирається серйозно займатися технічною творчістю, адже в одному пакеті є всі необхідні деталі для механіки: від електронних плат і спеціалізованих датчиків, до запасу болтиків і наклейок. Разом із інструкціями, які дозволяють створити досить складний механізм. Завдяки безлічі аксесуарів такий робот може стати чудовою базою для творчості. Основних шкільних знань з фізики та навичок з уроків праці цілком достатньо для збирання першого робота. Різноманітні сенсори та мотори підпорядковуються пультам управління, а спеціальні середовища програмування дозволяють створити справжніх кіборгів, які вміють виконувати команди. Наприклад, датчик механічного робота може фіксувати наявність або відсутність поверхні перед приладом, а програмний код вказувати, у який бік слід повертати колісну базу. Такий робот нізащо не впаде зі столу! До речі, за схожим принципом працюють реальні роботи-пилососи. Крім проведення прибирання за заданим розкладом та вмінням вчасно повертатися на базу для заряджання, цей інтелектуальний помічник може самостійно будувати траєкторії прибирання приміщення. Оскільки на підлозі можуть розташовуватись різноманітні перешкоди, такі як стільці та дроти, роботу доводиться постійно сканувати передлежний шлях та огинати такі перешкоди. Для того, щоб власноруч створений робот умів виконувати різні команди, виробники передбачають можливість його програмування. Склавши алгоритм поведінки робота в різних умовах, слід створити код взаємодії датчиків з навколишнім світом. Це можливо завдяки наявності мікрокомп'ютера, що є мозковим центром такого механічного робота. Навіть без спеціалізованих, і зазвичай дорогих наборів, цілком можливо зробити механічний маніпулятор підручними засобами. Отже, спалахнувши задумом створення робота, слід уважно проаналізувати запаси домашніх засіків на наявність незатребуваних запчастин, які можуть бути використані в цій творчій задумі. У хід підуть: Порада: «Незайвою навичкою при створенні робота буде вміння поводитися з паяльником, адже він допоможе надійно скріпити механізм, особливо електричні компоненти». За допомогою цих загальнодоступних компонентів можна створити справжнє технічне диво. Отже, щоб зробити свого робота з доступних у домашніх умовах матеріалів, слідує: Порада: «Намистинки очей для робота, декоративні ріжки-вусики з дроту, ніжки-пружинки, діодні лампочки допоможуть одушевити навіть найнудніший механізм. Ці елементи можна кріпити за допомогою клею чи скотчу». Зробити механізм такого робота можна за кілька годин, після чого залишається вигадати роботу ім'я та представити захопленим глядачам. Напевно, деякі з них підхоплять новаторський задум і зможуть змайструвати власних механічних персонажів. За межами кінематографу також є механічні роботи. Так, світ захоплюється вміннями робота-гуманоїда Асімо, який вміє ходити сходами, грати у футбол, подавати напої та ввічливо вітатись. Марсоходи Спіріт та К'юріосіті обладнані автономними хімічними лабораторіями, що дозволили зробити аналіз зразків марсіанських ґрунтів. Безпілотні автомобілі-роботи можуть пересуватися без участі людини, навіть складними міськими вулицями з високими ризиками непередбачених подій. Можливо, саме з домашніх проб створення перших інтелектуальних механізмів виростуть винаходи, які змінять технічну панораму майбутнього та життя людства. Сьогодні ми розповімо, як зробити робота із підручних засобів. «Високотехнологічний андроїд», що вийшов, хоч і буде невеликого розміру і навряд чи зможе допомогти вам по господарству, але неодмінно розвеселить як дітей, так і дорослих. На кінець дестабілізатора капніть пару крапель клею, або прикріпіть якийсь декоративний елемент - це додасть нашому творінню індивідуальності і збільшить амплітуду його рухів. Висновок

10 ресурсів для робототехніка-початківця

Кіборг із коробки

Мобільний механізм власного виготовлення

Відомі розумні автомати
 Милий робот Валл-І має у своєму розпорядженні глядача однойменного фільму, змушуючи співпереживати його драматичним пригодам, тоді як Термінатор демонструє міць бездушної непереможної машини. Персонажі Зоряних воєн – вірні дроїди R2D2 і C3PO, супроводжують у подорожах далекою-далекою Галактикою, а романтичний Вертер навіть жертвує собою в сутичці з космічними піратами.
Милий робот Валл-І має у своєму розпорядженні глядача однойменного фільму, змушуючи співпереживати його драматичним пригодам, тоді як Термінатор демонструє міць бездушної непереможної машини. Персонажі Зоряних воєн – вірні дроїди R2D2 і C3PO, супроводжують у подорожах далекою-далекою Галактикою, а романтичний Вертер навіть жертвує собою в сутичці з космічними піратами.Необхідні матеріали
Для того, щоб зробити робота своїми руками, не знадобиться знання ядерної фізики. Це можна зробити і в домашніх умовах із звичайних матеріалів, які завжди є під руками. Отже, що нам знадобиться: 
1. Прикріплюємо батарейку до двигуна
За допомогою пістолета, що клеїть, прикріплюємо шматочок пінокартону до корпусу мотора. Потім приклеюємо до нього батарейку. 



3. Ноги
Тепер необхідно забезпечити робота нижніми кінцівками. Якщо ви використовуватимете для цього головки зубних щіток, то приклейте їх до нижньої частини двигуна. Як прошарок можна використовувати все той же пінокартон. 




5. Підключення батареї
Використовуючи термопістолет, приклеємо провід до одного з кінців батареї. Можете вибрати будь-який з двох дротів і будь-яку сторону батареї - полярність у цьому випадку не грає ролі. Якщо у вас добре виходить паяти, у цьому кроці також можна скористатися паянням замість клею. 

6. Очі
Як очі робота цілком підійде пара намистин, які прикріплюємо термоклеєм до одного з кінців батарейки. На цьому кроці можна виявити фантазію і придумати зовнішній вигляд очей на власний розсуд. 
7. Запуск
Тепер давайте оживимо нашу саморобку. Візьміть вільний кінець дроту та прикріпіть його з незайнятого контакту батареї за допомогою липкої стрічки. Не варто використовувати на цьому етапі термоклей, тому що це не дозволить вам при необхідності відключити двигун.